
|
|
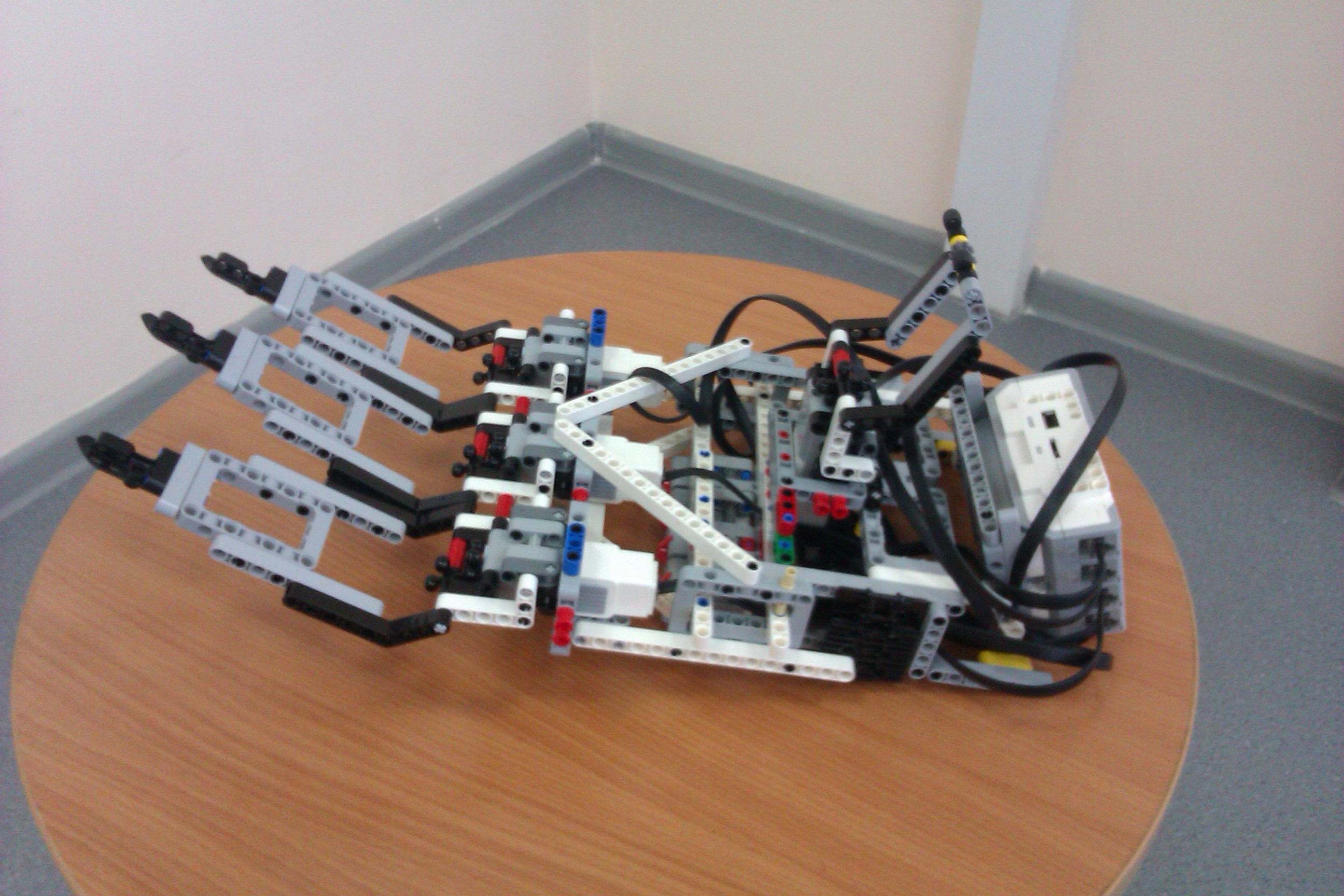
Прототип кистевого протеза
Творческая категория. Тема "Роботы и космос". Средняя группа.
Команда: NIRVANAРегион: Красноярский Край
Город: Красноярск
Название ОУ: Школа 152
Руководитель команды: Плотников Роман Евгеньевич
Оператор №1: Тюрин Иван
Оператор №2: Кривякин Александр
Зарегистрировал робота: Плотников Роман Евгеньевич
|
Описание:Целью работы было создать робота, который мог бы помогать выполнению работ, опасных для человека.Для решения поставленной цели необходимо решение следующих задач: • Анализ проблемы. • Сборка робота, способного решить проблему. • Программирование робота. • Апробация итогового прототипа. В перспективе может быть собран второй прототип кисти для большего оказания помощи людям с ограниченными способностями. В дальнейшем будет собран большой робот с двумя прототипами кистей или будет использоваться второй контролер большого пальца. Принцип действия:Программа состоит из четырёх крупных циклов (03, 04, 06, 09).Циклы эти отличаются между собой нумерацией внутренних подциклов, а также номерами портов, в который присоединены датчики и моторы. Внутри каждого подцикла содержится мини-программа для управления односторонним движением пальцев (вперёд или назад). Каждый такой подцикл проигрывается один раз. Все 4 крупных цикла проигрываются бесконечно. Технические характеристики:Прототип кистевого протеза был создан из 4-х средних моторов, контролера EV3 и 4-х датчиков касания которые служат как пульт управления пальцами |